火星探测器等传统探测外星人的世界通常从车轮上的卷来,不能够颠倒。粗糙表面和低重力描述小彗星和小行星等机构,然而,使传统的动作更危险。
科学家们一直渴望学习和探索彗星和小行星,这些被认为是行星的构建块,但发送机器人任务等这些世界可以棘手的是证明了欧洲航天局(ESA)的罗塞塔去年任务。
虽然菲莱着陆器成功降落在67 / churyumov - gerasimenko彗星的表面,调查两次反弹,最终休息不到理想的位置。因为彗星67 p等远比地球上的弱引力场,丝毫没有必要常规机器人运动可能会带来灾难。
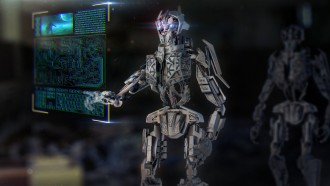
美国宇航局喷气推进实验室的研究人员,麻省理工学院和斯坦福大学似乎已经想出一个解决这个问题的概念刺猬机器人特别设计来克服挑战的导航在太阳系的小身体。万博体育登录首页
“刺猬是一种不同的机器人会跳和滚筒表面上而不是滚动的车轮上。它的形状像一个立方体,可以操作,不管哪一方土地”说Issa Nesnas,从美国宇航局喷气推进实验室。
两个刺猬的原型,一个是覆盖着峰值作为腿,可以用作采样探针表面的彗星和小行星,另一个,一个基本的多维数据集,进行了测试在美国宇航局C-9飞机研究微重力在6月。
机器人演示了几种类型的动作在一个广泛的表面从桑迪冰冷,穿越小身体,低重力时是有用的。
本杰明Hockman,从斯坦福大学,说他们已经尝试了许多高峰配置,发现一个立方体形状提供了最好的跳跃性能。他还指出,一个立方体结构更容易制造和包和宇宙飞船。
研究人员目前正在研发的自主机器人试图增加刺猬能做的许多事情没有指令来自地球。轨道母舰的想法是将传输信号和好奇心的机器人以类似的方式和机会通过火星轨道卫星进行通信。
ⓒ2023 T万博体育登录首页ECHTIMES.com保留所有权利。不复制未经许可。